
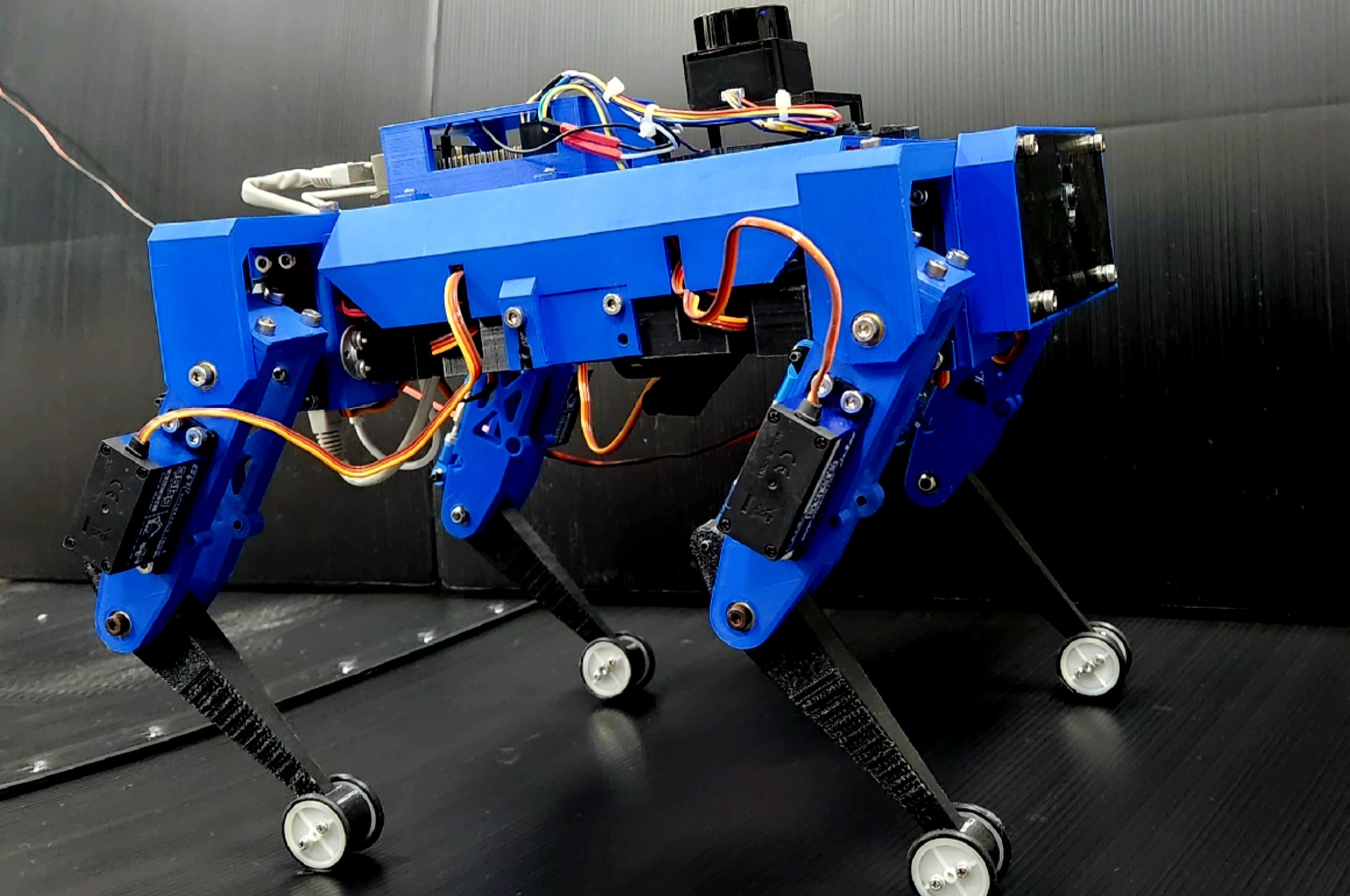
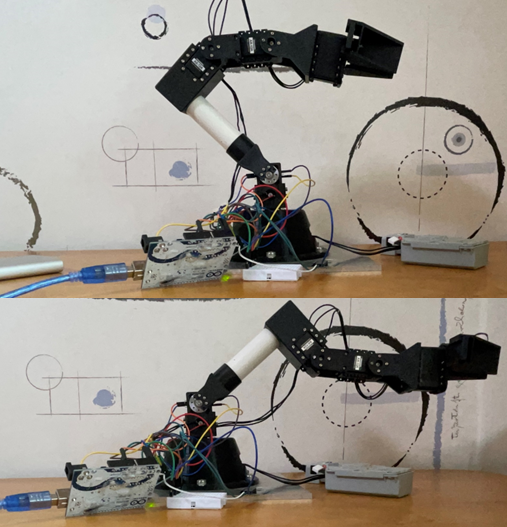
잘 서는 로봇
22 임준범
22 임준범
21 정명우
22 임준범, 21 최준빈, 20 최수용, 22 한혁규, 20 김도엽, 23 권혜령, 23 박관호, 23 정인서, 23 이정민, 23 최우준
21 이혁진, 21 정명우, 20 송민석, 22 심준표, 20 박하준, 23 박시형, 23 김가경, 23 정연우
22 김동재, 22 김민준, 23 남택근, 23 오소연, 23 이로운, 23 주민찬

23 김세훈, 23 문우혁, 23 변윤지, 23 Abbasov Nijat, 22 이서희, 22 최재윤, 21 박철민, 21 서정근

23 최재은, 23 김주찬, 23 엄돈건, 23 이태헌, 23 최지민, 23 전지윤, 23 김건우, 23 최현민, 23 오진석
22 엄돈건, 22 최민준

21 강응조, 21 명경민, 21 박철민, 21 최준빈
21 최준빈, 21 박철민
18 최지용, 20 김도엽, 21 이민정, 22 김진석, 22 서재영
21 강응조, 21 김기현, 21 명경민, 22 이서희, 22 임준범, 22 최재윤

21 서정근, 22 한혁규
윤태호(18), 박희찬(18), 최지용(18)
김기현(18 원자력및양자공학과 orca2005@kaist.ac.kr), 강승관(18 전기및전자공학부)
김건(17 생명과학과 skygun88@kaist.ac.kr), 한승희(17 전기및전자공학부), 김재욱(17 전기및전자공학부), 이준(18 기계공학과)
성기헌(16 전기및전자공학부), 김신정(17 전산학부) 김지인(17 전기및전자공학부), 최지용(18 기계공학과), 박태형(18 전기및전자공학부), 박희찬(18 기계공학과)
박종준(18 전기및전자공학부 pjjkey@kaist.ac.kr), 박민준(18 전기및전자공학부), 정성재(19), 김기현(18 원자력및양자공학과/멘토)
박태형(18 전기및전자공학부 pth916@kaist.ac.kr), 김건(17 생명과학과), 김재욱(17 전기및전자공학부), 한승희(17 전기및전자공학부)
박수범(18 기계공학과 subeom272@kaist.ac.kr), 이승준(18 항공우주공학과), 박태환(19 새내기과정학부), 윤준혁(19 새내기과정학부)
양찬열(18 전산학부 reader2000@kaist.ac.kr), 김도현(18 전산학부), 이태우(18 기계공학과), 송태규(19 새내기과정학부)
고형석(19 새내기과정학부 kohs100@kaist.ac.kr), 조명근(19 새내기과정학부), John(18 전산학부), 김인엽(18 원자력및양자공학과/멘토)
정윤재 (19 새내기과정학부 nature_cyj@kaist.ac.kr), 김성윤 (19 새내기과정학부), 김민서 (19 새내기과정학부)
정송현(18 기계공학과 jsh1234@kaist.ac.kr), 이준(18 기계공학과), 박종건(18 전기및전자공학부)
이도혁, 김인엽, 이용민, 이도균
김신정, 이수연, 이준, 오철민
천석범, 김준현, 안효준, 황선화
신재국, 박종준, 송민서, 송세영
한우현, 김건, 이나연
강승관, 김기현, 임도훈, 안효건
박민준, 윤지언, 최지용

박준영, 김종서, 유상혁, 이태우
최덕규, 임휘준, 정진영, 김신정
김재우, 엄용, 최영우
김건, 김종서, 김재욱, 홍지승

성기헌, 이도혁, 조재민, 최병호

김지인, 한우현

정원교, 황민영
한승희, 송재엽, 박상준

이원준
김규광, 김재우, 김휘민
김규광, 임휘준
김규광, 현지음
김규광, 최덕규, 임휘준, 김형근
김영서, 최덕규
이종은, 허준혁, 신민기

김규광, 현지음, 최덕규

김규광, 김휘민, 최덕규
최덕규, 임휘준, 이도혁

김휘민, 조재민, 신동욱, 천석범

임휘준, 천석범, 김동현

지창근, 조영걸, 이동현, 강현우

염규성, 이진섭, 성기헌

조영걸, 김현준, 편재훈

ShoeMaker(김형근, 최덕규, 오영훈, 김영서, 이준만)
김규광, 최덕규, 임휘준

김규광, 김형근, 노희건, 임휘준
김규광, 임휘준, 최덕규, 김휘민
김규광, 임휘준, 김휘민, 최덕규

김규광, 최덕규, 김휘민

김규광, 최덕규, 김휘민, 임휘준
김규광, 현지음, 최덕규, 김형근

김규광, 김형근, 노희건, 임휘준

김규광, 김형근, 노희건
현지음, 조성현, 최종훈, 김한빛 외

임휘준

조성현, 최종훈, 현지음, 김형근

조성현

눈물 젖은 파프리카(조성현, 김형근, 김종휘, 현지음, 유혜원)

김한빛
최덕규, 김휘민, 김현준
DUCK_U(최덕규, 김현준, 이종은)
신민기, 염규성, 강현우