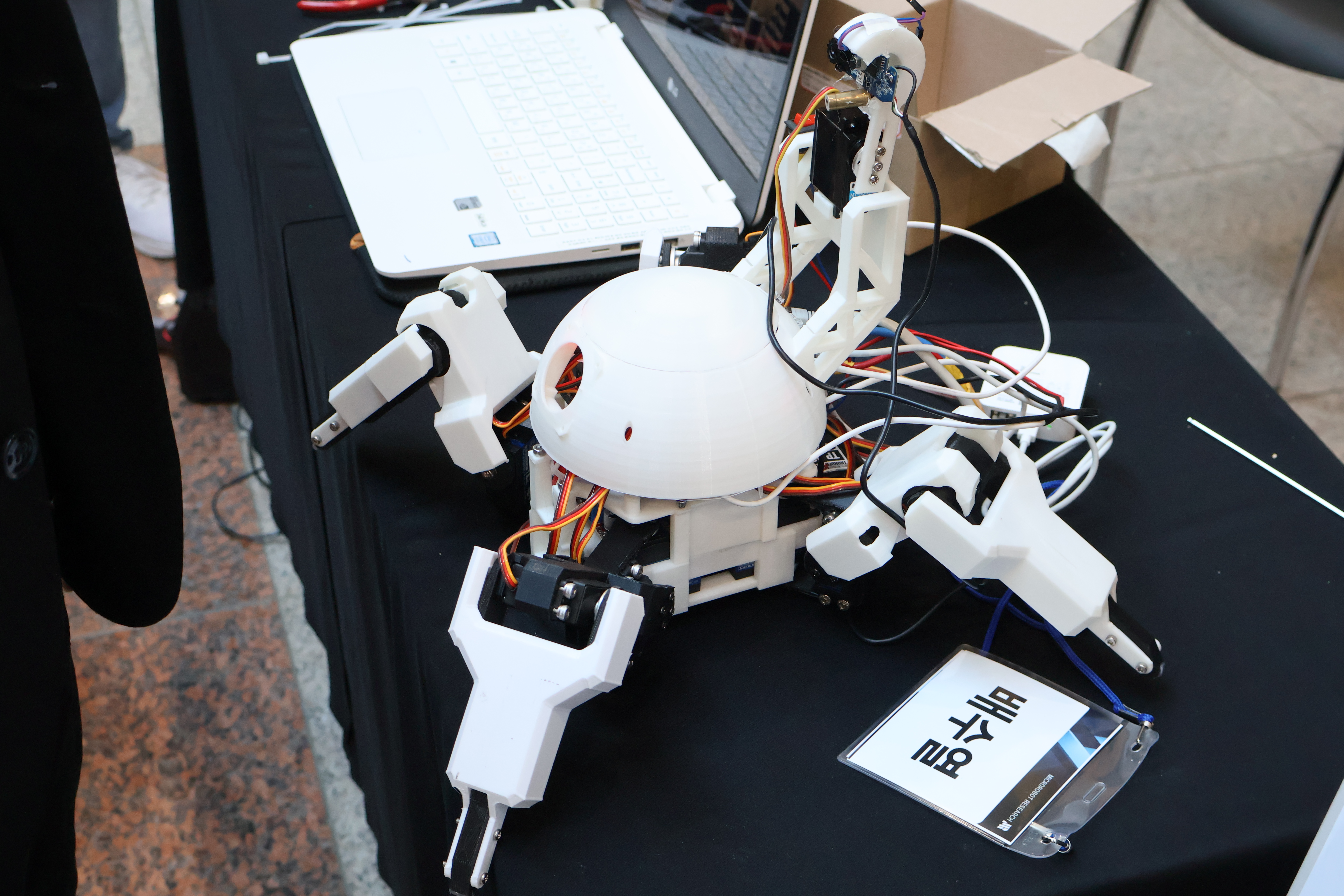
Junior , 2023그물 오르는 4족 보행 로봇의 설계 및 연구4족 보행 방식으로 그물이나 사다리 형태의 벽면을 오르는 로봇을 설계 및 제작했다. 지면과 수직에 가까운 큰 각도로 구성된 그물이나 사다리 형태의 장애물을 극복할 수 있는 로봇을 개발했다. 지면에서 보행하는 기본적인 움직임을 구현 후 해당 로봇의 움직임을 그물을 오르는 움직임으로 확장시키는 방향으로 연구를 진행하고자 한다.