Senior , 2016
마커 검수를 통한 마커 기반 시스템 보조 로봇

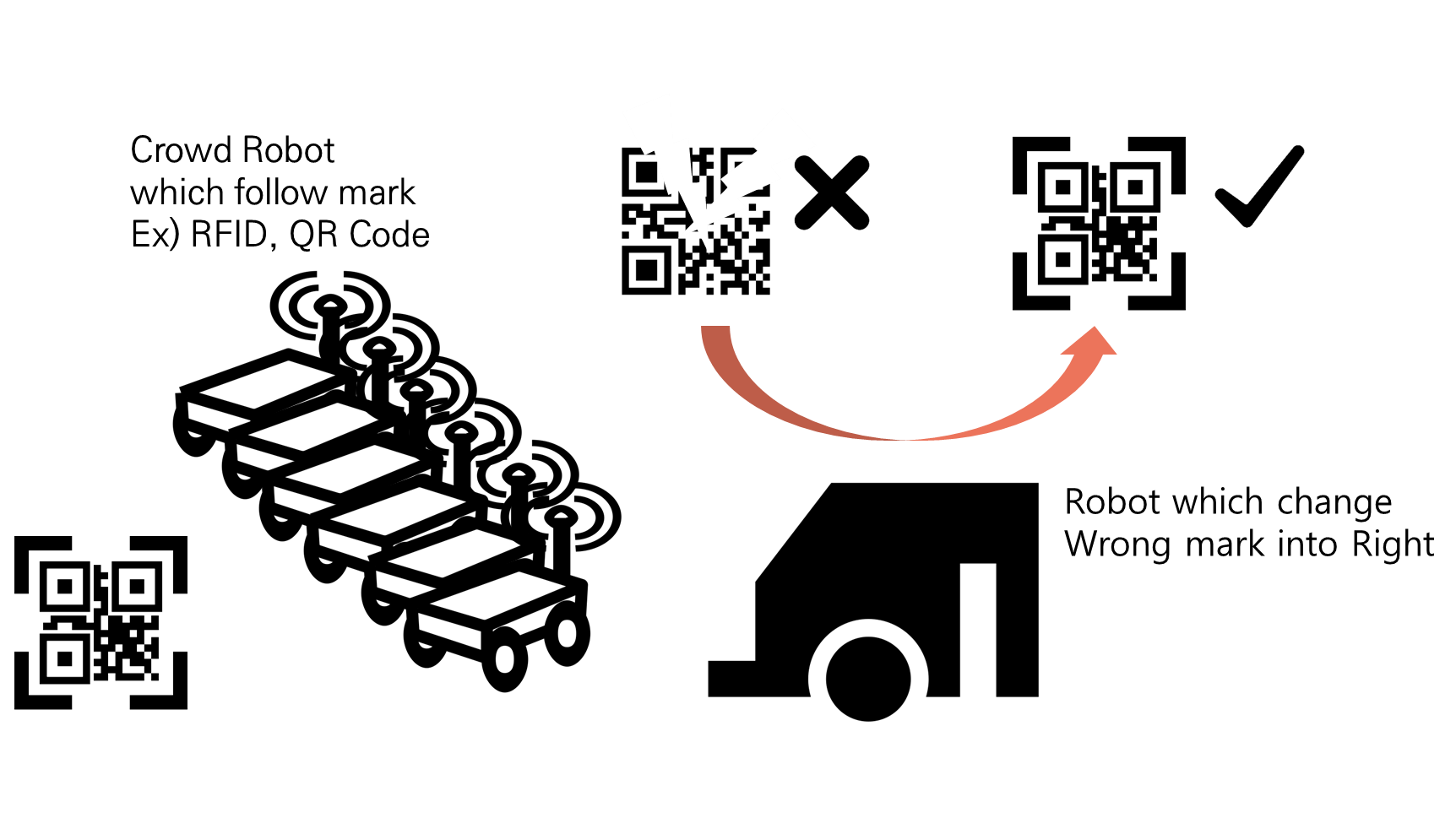
이 로봇은 마커 기반 제어 로봇을 보조는 목적을 가지고 있으며, 결과적으로는 마커 기반 제어 로봇이 작동하는 현장에 투입되어 해당 로봇들을 작동 시키기 전에 좌표에 대한 신뢰성을 얻기 위해 제작되었다.
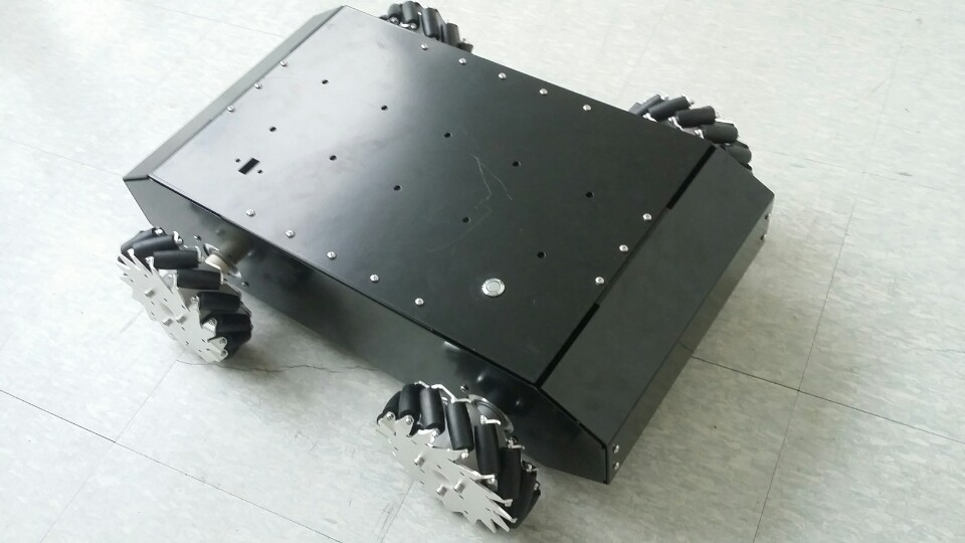
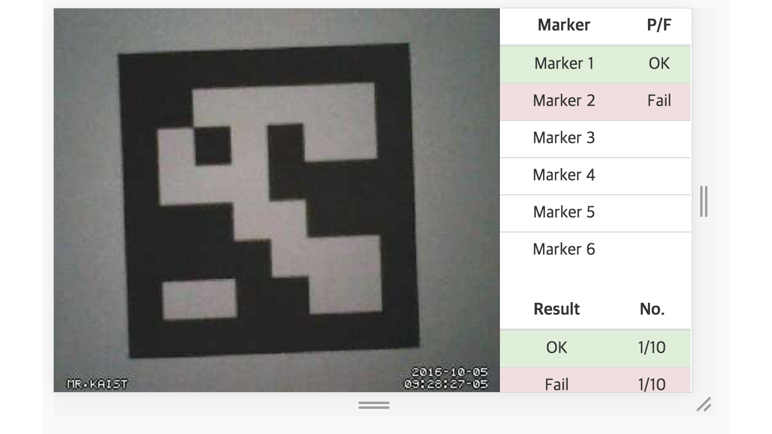
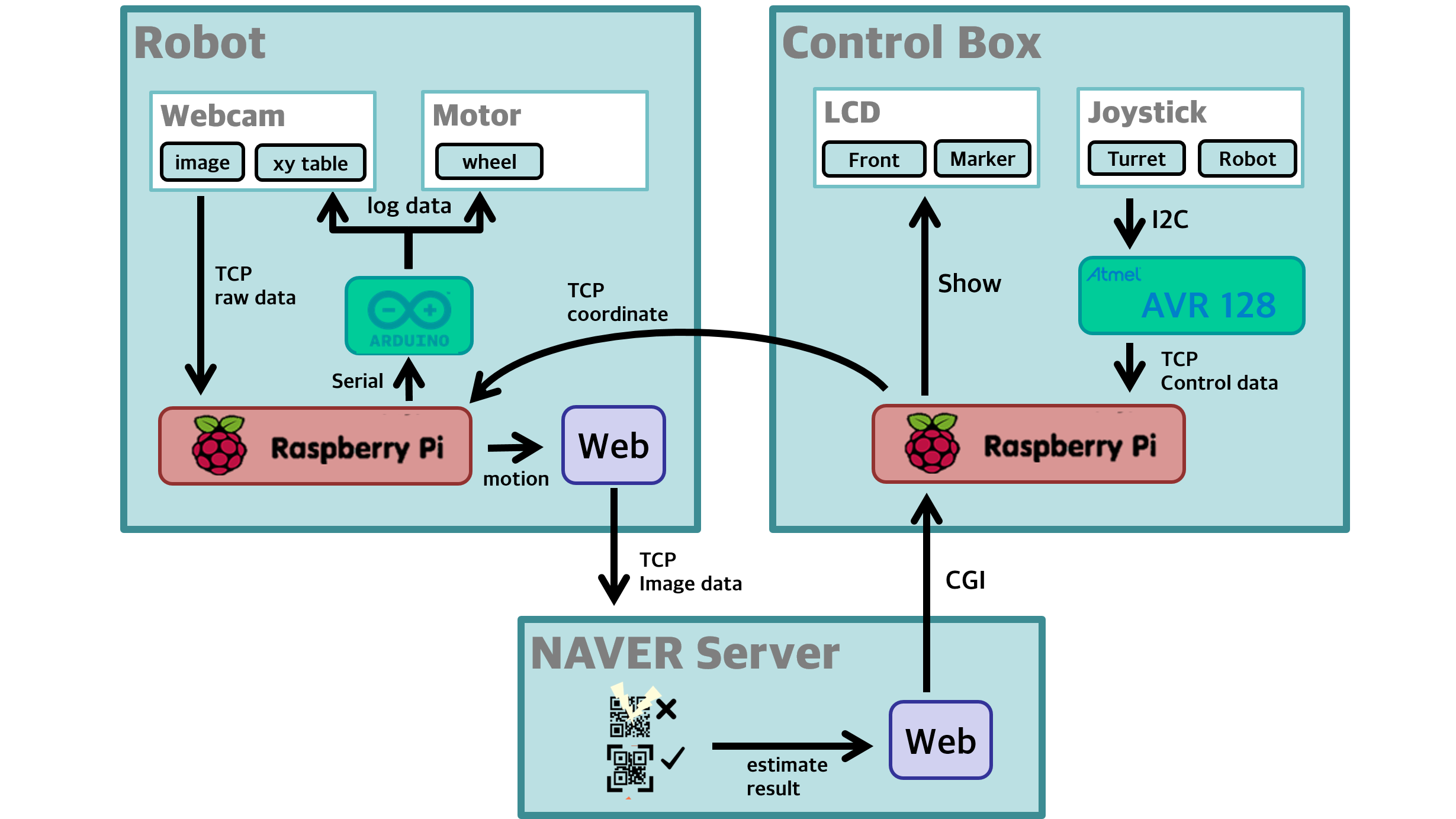
로봇 시스템은 control box, 주행 플랫폼, 서버(Naver D2에서 제공)로 구성되어있다. control box를 통해 사용자로 하여금 로봇의 현 상황을 스트리밍 받거나 초기 마커 맵핑시 tcp 통신을 통해 로봇의 움직임을 제어하고 또 좌표를 저장하도록 하는 역할을 하며, 주행 로봇 플랫폼은 마커를 인지하기 위한 인식파트와 정확한 구동을 위해 사용된 스테핑모커, 메카넘 휠 등으로 제작되어 실질적인 마커의 물리적인 검사를 맡고, 서버에서는 인식한 마커의 유사도 테스트와 사용자에게 더 많은 정보를 줄 수 있는 UI로 제작된 웹서버를 제공하는 역할을 맡는다.
즉, 이 로봇 시스템은 저장된 마커의 위치 좌표 데이터를 하드웨어적으로 정확한 좌표 이동을 구현함으로서 해당 위치에 올바른 마커와 유사성을 검사하도록 하는 것이다.


