W5.KAIST
W5.KAIST 팀 소개
W5는 Which Was What We Wanted의 약자로 카이스트 로봇동아리 미스터 내의 프로젝트 팀입니다.
2014년 캔위성 경진대회 참가를 위해 김규광, 김형근, 노희건 회원이 최초 결성하였고
이후 지속적인 기술 개발, 대회 참가 및 논문과 학회 발표 등의 연구 활동을 진행하고 있습니다.
현재
- 미생물 배양 및 검사 자동화
- 멀티콥터형 무인기 (통칭 드론) 응용 프로젝트
- Environmental Robotics
- Bio-inspired Robotics
등의 다양한 주제로 연구를 진행하고 있습니다.
W5.KAIST GitHub Page W5.KAIST Youtube Channel팀 연혁
팀원







프로젝트
로봇 플랫폼 부착식 위치인식용 데이터 수집 시스템
김규광, 김재우, 김휘민
실내 위치 인식에는 Wi-Fi fingerprinting과 자기장 SLAM, 레이저 스캐너 등의 다양한 센서들이 사용되며 map 생성을 위해 건물 내부를 스캔하는 작업이 필요하다. 큰 건물 등에서의 수집 작업을 줄이기 위해 로봇 청소기, 청소용 카트 등에 부착 가능한 센서 logging 시스템을 제작하였으며 실제 로봇청소기 모델 로봇에 부착하여 검증하였다.
BioNetTopol
김규광, 임휘준
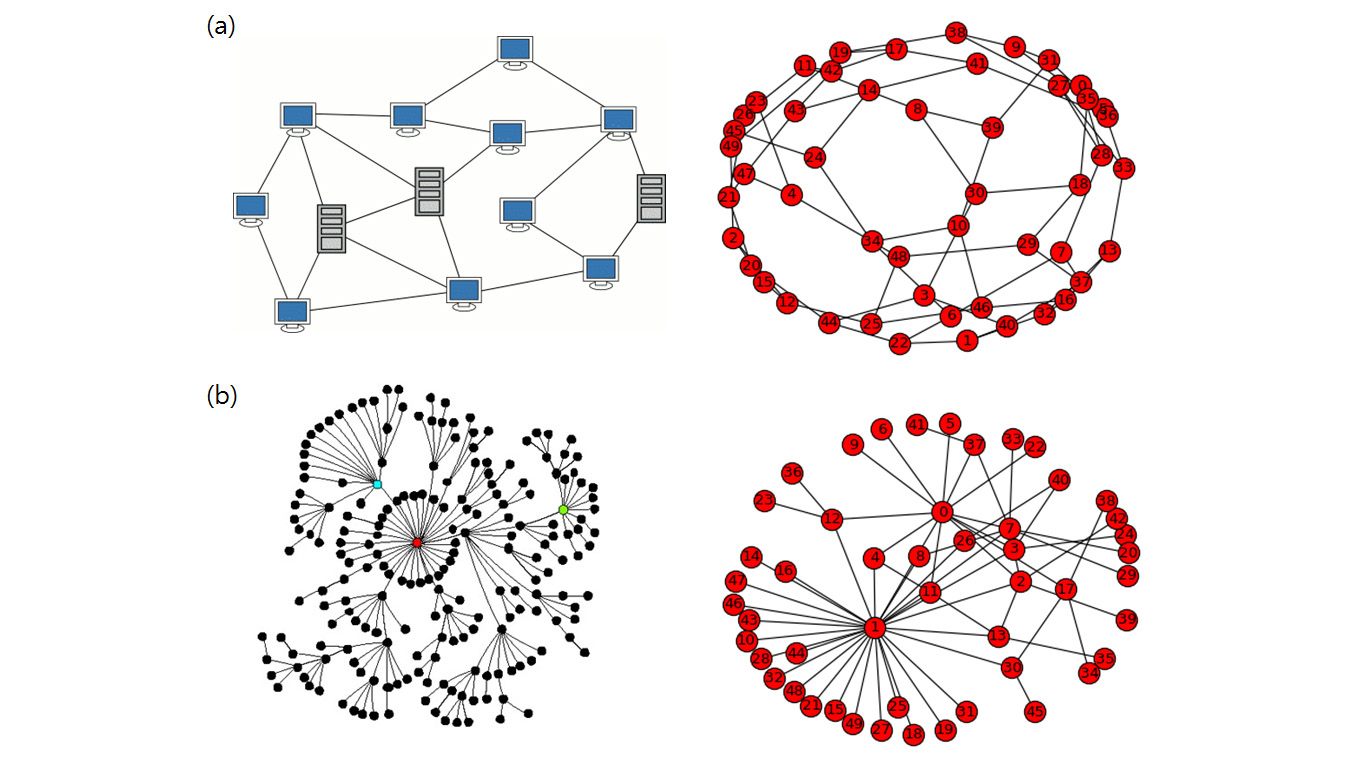
Mesh 혹은 random network topology가 센서 네트워크 구성 시 일반적인 네트워크 구조로 사용되나 이를 생체 네트워크에서 나타나는 topology를 적용함으로서 성능 및 robustness 를 올리고자 하였다. 생체 네트워크에서 주로 보이는 scale-free network 구조의 경우 임의의 node에서 node로 이어지는 평균 거리가 3 정도로 축소되며 다수의 link가 연결된 hub, 링크 수는 적으나 주요 hub들을 이어주는 bottleneck node를 계산을 통해 얻을 수 있어 전체적인 패킷 전송 효율이 올라가며 hub 및 bottleneck의 성능 증대 시 전체적인 시스템 성능이 좋아지는 것을 확인할 수 있었다.
BioLabAST-LEDMarker
김규광, 현지음
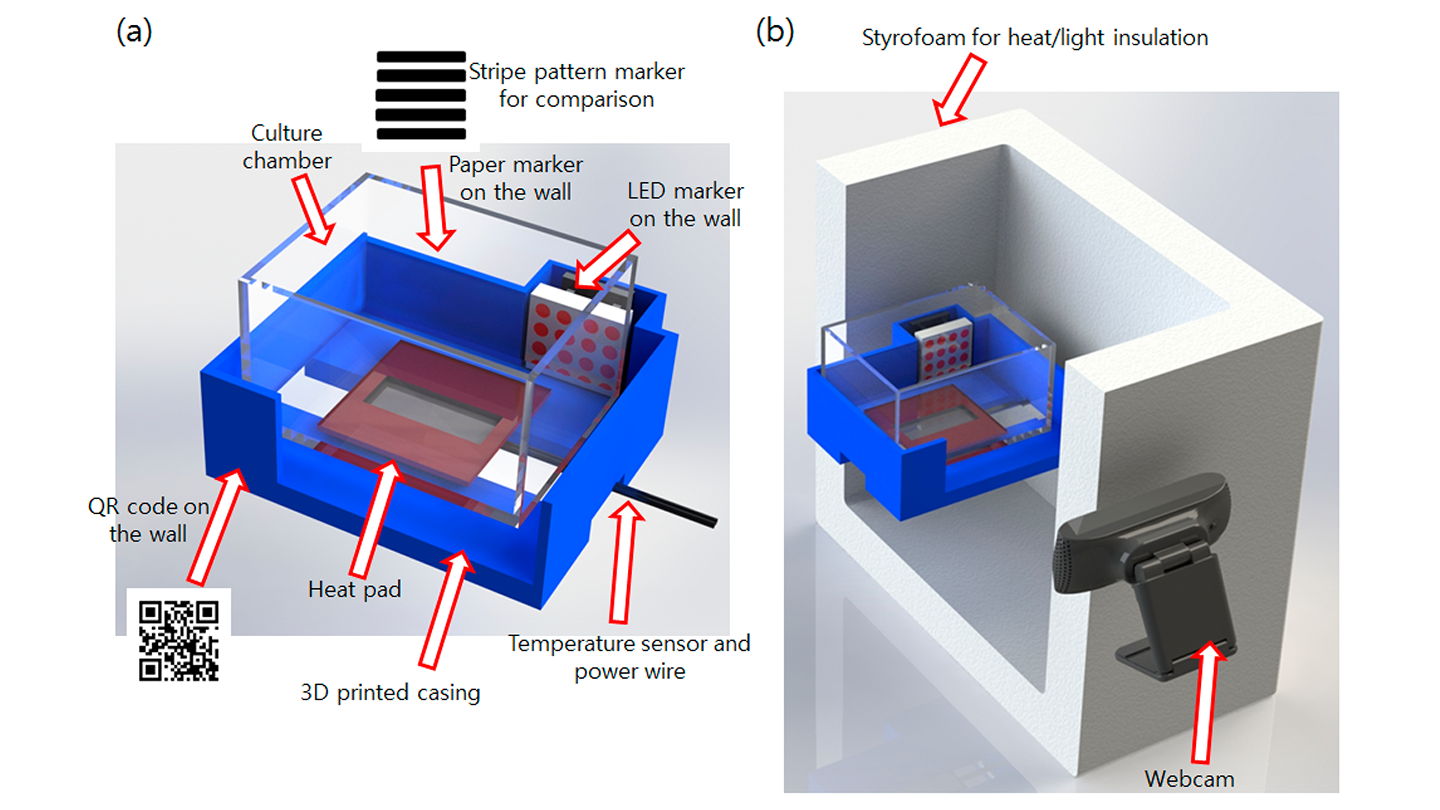
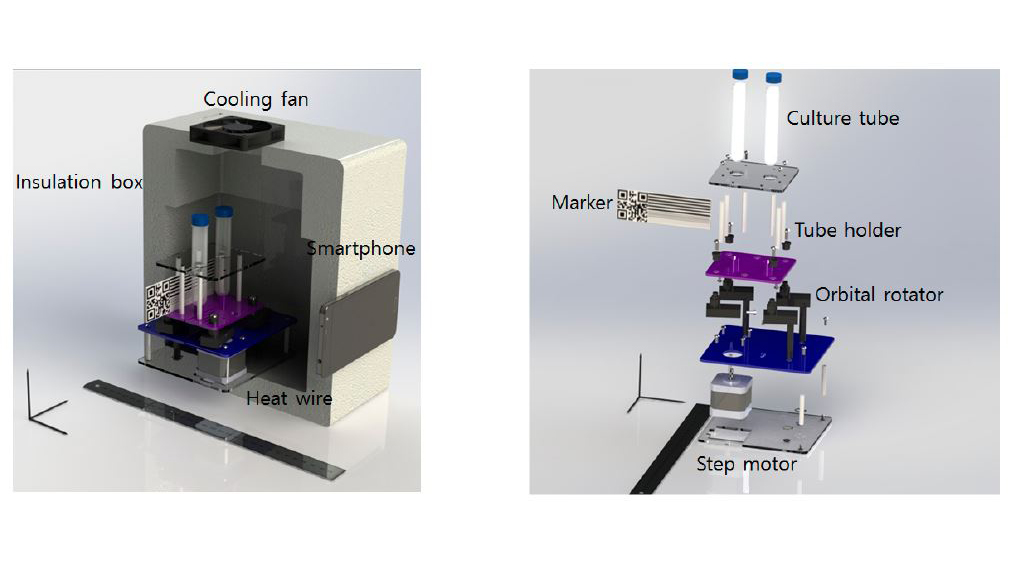
항생제 감수성 검사에서의 OD를 사용하지 않고도 성장 정도 측정을 위해 BioLabAST 프로젝트를 진행하였으나 어두운 배양실, 커다란 배양 용기, 진한 색의 배양배지 등으로 인해 종이로 만든 stripe pattern marker가 잘 보이지 않는 경우가 발생하였으며 이를 해결하기 위해 마커 자체를 LED로 만들어 스스로 빛을 내는 Active 마커 사용. LED 를 영상처리로 인식하여 해당 지역에 대한 FFT 값을 측정하여 마커가 보이지 않는 정도를 계산하여 성장도 측정.
BioLabAST
김규광, 최덕규, 임휘준, 김형근
항생제 감수성, 생물독성 등의 측정을 위해 미생물 생장 정도를 아는 것이 중요하며 다양한 생명공학 실험에도 적절한 미생물 생장 측정을 요구함. 생장 관측에는 흡광도 측정이 사실상 표준으로 사용되나 측정을 위해 측정 장비의 경우 고가이며 직접 제작되는 저가형 흡광도 측정기들의 경우 레이저-광센서의 alignment 등에 많은 정비를 요구한다. 또한 배양액의 총량이 적은 경우에는 적용할 수가 없다. 본 프로젝트는 배양액의 탁도가 증가한다는 특성을 이용해 레이저 대신 배양 용기 뒷면에 마커를 부착하고 탁도 증가에 따른 마커의 blurring을 측정하는 방식으로 현장에서 생장 정도 측정을 하기 위해 제안되었다.

VANSI
김규광, 현지음, 최덕규
건축물 구조 모니터링 (Structural Health Monitoring, SHM) 에 드론을 포함한 많은 로봇이 사용되나 교량의 기둥 (column) 부분의 경우 수면에 인접하거나 물보라 등으로 인해 통상의 벽면등반 로봇이 접근하기 어려운 지역이다. 이러한 구역의 SHM을 위해 무인선에 카메라를 장착하였으며 물살 등에 영향받지 않고 column에 인접하게 부착할 수 있도록 수직 방향 thruster를 장착하였다. 또한 레이저 스캐너를 이용해 다리 교량 2개 사이에서의 위치 인식 또한 구현하였다.